During the early 1970’s the British Army was seeking to improve fall of shot accuracy and intelligence gathering on red force locations/assets during all phases of potential engagement in the Northern European area of operations. The ideal solution was to deploy a real time aerial reconnaissance system using an unmanned hovering platform with a 24/7 sensor systems, but no such platform or sensor system currently existed to match these needs.
This narrative is an overview of the development of such a capability as seen by one of the system designers; it was truly a team effort so my apologies if I have missed important issues /contributors. Also the opinions expressed here are entirely those of the author.
What emerges from this overview is the depth of engineering capability and ingenuity the UK designers captured to produce a unique capability which was the fore-runner of many such unmanned vehicle systems which are now routinely deployed for both military and commercial surveillance purposes. So today for less than £1,000 it is now possible to achieve many of the military needs and emphasises how technology has moved forward over the past 40 years.
The requirement
UK Ministry of Defence procedure calls for an operational requirement (OR) document to define and justify its needs; a team led by Major Mike Dewar (based at The Old War Office Whitehall) consolidated the Army’s future requirement in a General Staff Target paper (GST 3494); the GST called for a series of studies to assess the potential technologies available for a Multi Role Unmanned Airborne Surveillance and Target Acquisition System (MRUASTAS). The government research establishments at Fort Halsted, Malvern, Cranfield and Farnborough (particularly the Army Personnel Research Establishment - APRE) were tasked to carry out studies and war gaming on various aspects of the requirement with industry involvement to produce equipment to add in-depth understanding to the studies; the outcome of this work determined the sub-system architecture which eventually resulted in the development of Phoenix.
The studies underpinned GST 3494, later to become General Staff Requirement 3494 (GSR 3494), which fully defined the system needs of both the Intelligence and the Artillery Corps with an additional need for the system to be maintainable by the Royal Electrical and Mechanical Engineers (REME) field repair teams. Needless to say there were many hours of heated debate within the Ministry of Defence (MOD) as to which Corps had the lead role and who was responsible for the system trade-off.
For the artillery User, the key need was for timely accurate ground co-ordinates of fall of shot so corrections could be achieved quickly; this favoured a helicopter based solution where the observing sensor system could hover over the impact area to maximise accuracy. Whereas the Intelligence User needs were for wide area surveillance to locate red force deployed assets, movement of stores, and operational command posts; this favoured a fixed wing aircraft solution to provide wide ground area surveillance. The GSR defined the operational environment as being the Northern Europe plains and the system must be fully compatible with the Battlefield Artillery Target Engagement System, (BATES) which was already under development.
The REME requirements were to use the BATES computing modules which had nuclear hardened components and its field sensor repair facility (later know as Thermal Imaging Repair Facility - TIRF) with all repairs being carried out at first or second line of operations.
Fortunately it was not mandated to use BATES computing modules on the air platform (as it could never be nuclear hardened to survive a nuclear detonation); the GSR also recognised in active combat an air platform mortality rate of up to 60% during missions could be expected. So on one hand the wish was to minimise the air platform costs but equally it would be necessary to carry high performance sensors with a sophisticated guidance capability to self navigate to predetermined locations and return home automatically once a mission was completed.
1975 Early sensor trials with manned platforms, the remotely piloted MOTE and WISP helicopter platform in support of GST 3494 and the start of the SUPERVISOR Programme
Contracts were awarded by MOD (PE) to Westland Helicopters and GEC-Marconi to develop system components for the Supervisor programme and assist the MOD establishments with trials.
The GEC-Marconi Electro – Optics team based at Basildon Essex, had a proven track record in the development of high performance stabilised sensor platforms based on the then unique stabilisation technology developed by the Marconi Baddow team lead by Maurice Johnson. This technology harnessed the use of direct drive motors on a three axis inertial balanced sensor package mounted in near frictionless bearing in combination with gyro stabilisation/steering. The Heli-Tele system (lead by Terry Lewis), was developed several years earlier for the British Army in conjunction with Westland Helicopters based at Yeovil using the above technology) and had fully demonstrated how long range surveillance with high magnification optics was possible even in the high vibration environment of a helicopter was achievable.
Indeed the high performance sensor 14 inch diameter turret eventually designed for Phoenix was the fore-father of the majority of sensor turrets universally seen today on most airborne surveillance systems.
The importance of stabilising the sightline of a sensor cannot be understated in carrying out surveillance employing high definition sensors at long stand-off distance; also long stand-off ranges gives some degree of protection to the air-platform from ground fire and increases the difficulties for Mark1 eyeball to locate against a grey/blue sky background.
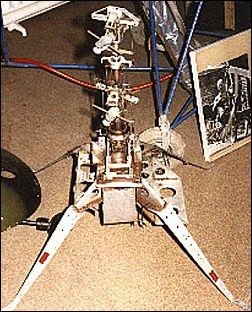
Westland Helicopters had a team of designers, Reg Austin, Tony Ives, David Wright and Mike Breward who were developing a contra-rotating helicopter concept MOTE (pictured above) which would result in a small air platform capable of hovering over a target area as well as powered flight in any direction; this demonstrator was used to trial the concept which lead to the second generation of a vehicle known as WISP.

The WISP platform carried a stabilised daylight TV sensor from the Basildon team nominally pointing downwards with 30° lookup capabilities from the vertical to provide more general viewing of ground targets. As WISP could rotate whilst stationary it was possible to carry out the surveillance tasks defined in GST 3494 to a limited extent. A two way radio link (developed by the Basildon team), enabled the ground controller to fly WISP (within visual range) and carry out fine positional manoeuvring, whilst the down link transmitted the video scene for the ground based observer to carry out the surveillance and fall of shot correction functions. The sensor and radio link sub-systems were integrated into the platform by the Westland team and joint trials were carried out on the Larkhill Ranges with the MOD teams gathering data for the studies.
Meanwhile other sensor studies were being carried out to determine the optimum sensor (daylight/ low light/colour etc) to maximise system performance; these trials (overseen by Ken Earney) involved manned helicopter flights over specifically deployed targets with the majority being flown by a Wessex 3 helicopter operated by the Royal Aircraft Establishment Farnborough with mainly sensor systems supplied by the GEC Marconi team. Video recording of the imagery was analysed by the MOD establishments and was used in war gaming scenarios to assess the effectiveness of the sensors system deployed. In addition imaging material was recorded on a MOD owned DC4 to obtain higher altitude fast crossing rate video material employing a line scan system from Vinten’s and other sensor suppliers.
Analysis by APRE Farnborough (Mike Waygood’s team), at RSRE Malvern (Steve Gibb’s team of Stan Fray, Mike Dunsmore, Alan Owens et-al) and the war gaming team at Fort Halsted (Dr Mike Goldsworthy, Sq Ldr Doug Taylor rtd et-al) concluded for an observer to digest a moving scene and reliably detect a ground target required a minimum of 3 seconds of viewing of a scene which in turn determined the a scene crossing rate from top to bottom of a TV display; colour imagery was helpful at short range viewing but at long range viewing angles, airborne obscurants/atmospheric dispersion imparted the image with a blue haze which negated some of the advantages of colour. Low light sensors provided good operational capability down to quarter moonlight conditions but the image “halo” effect from “bright” light sources and intentional “blinding” made target discrimination very poor. Another sensor system evaluated was a pyro-electic camera (an Infrared sensor) from Rex Watton’s team at Malvern, although relatively low in resolution/sensitivity this sensors did prove to be most effective in locating targets throughout a 24 period, even when under camouflage nets or within woodland screened scenarios; this was a key capability in the operational envelop to cover night/day missions. The negative of the pyro-electic sensor was the lack of target detail/definition for intelligence and asset recognition. As can be seen in the cartoon at the end of this note, the combined team had good camaraderie as the team gathered results to move forward to the next stage of system development.
1977 Development of the WIDEYE platform and the SUPERVISOR programme
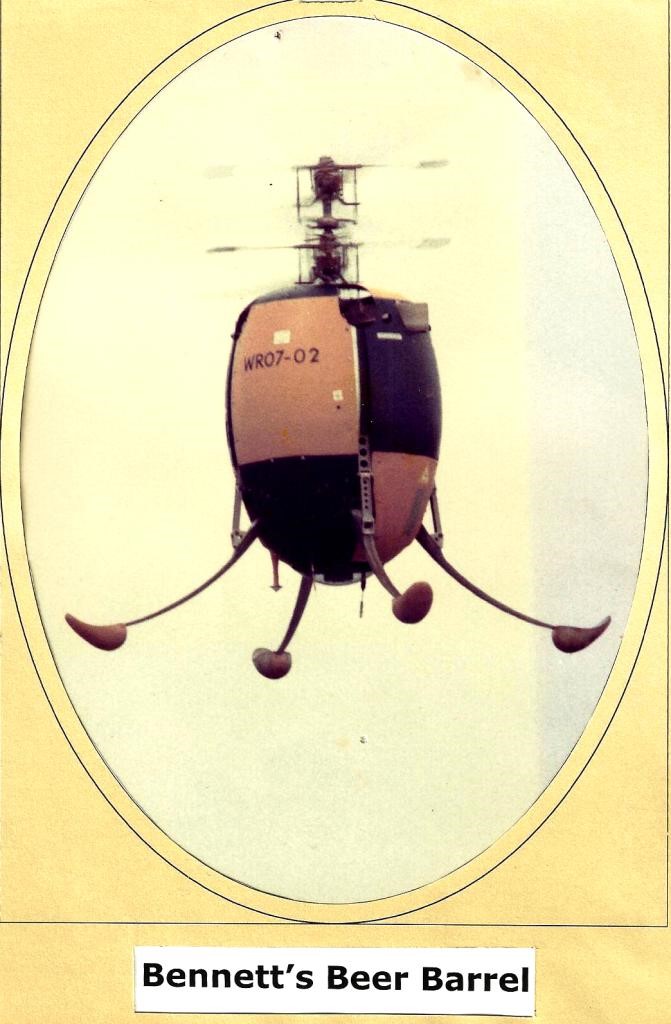
The WISP platform had demonstrated the ability to provide high quality black & white daylight TV images in battlefield situations but lacked load carrying capability or endurance to match the User requirement. The MOD Procurement Executive (PE) DSCP team at Fleetbank House, London, led by Bernard Amos as Director and Assistant Director Col Dicky Dare(retired) ; commissioned further work, now named the SUPERVISOR programme requiring the development of a larger contra-rotating platform called WIDEYE (known as Bennett’s flying barrel colloquially by the Westland development team) as the next step forward.
The programme officer was Alan Bond and military advisor/project manager Lt Col John Mesch.
Again the Westland team, now led by Professor Dr Jeff Jones and the GEC-Marconi team led by Mike Howe carried out the development tasks. The Westland team rapidly developed the WIDEYE vehicle and the Marconi team worked on a ground control station integrated into a converted 3 tonne Bedford Army truck; this truck housed a mission controller, air-vehicle controller work station and an image interpreter’s work station along with computing, recording and monitoring equipment. The ground station became a second home for Tony McQuiggan who spent many hours refining the system performance. A completely new stabilised sensor sub-system was developed with a nominally vertically pointing stabilised camera but with ability to look around in all directions up to 30° elevation as commanded by the ground based image interpreter. To increase the stand-off range of the WIDEYE platform from the ground station, a steerable directional antenna system was mounted on the roof of the ground station in place of the Omni directional aerial used in earlier WISP trials.

Also distance measuring equipment (DME) capability was added to the two way radio link allowing WIDEYE direction and distance from the ground station (hence location) to be computed. The Westland team were responsible for integration of the sensor platform into the WIDEYE platform and the air platform control elements in the work stations in the ground station. The overall integration/functioning of the ground station and computing systems were the responsibility of the Basildon team.

The work stations could both display a moving map of the terrain under the platform and/or the visual scene as gathered by the WIDEYE sensor, the vehicle controller station had additional functionally developed by the Westland team specific to the control and monitoring the status of WIDEYE. The WIDEYE platform included an inertial navigation package which allowed the sensor system to present a North up image or the forward vehicle track at the top of the image to assist the observers in the ground station. Extensive tethered ground running trials were carried out by the Westland team at Yeovil to demonstrate the endurance and reliability of the WIDEYE platform with its ground breaking technology. Equally extensive system trials were carried out at the Rivenhall Airfield near Chelmsford, a disused World War 2 airfield used frequently by GEC-Marconi for radio/radar trials. Tony McQuiggan and Peter Turp spent many weeks in the ground station commissioning the computing software which was installed on BATES hardware modules, this proved to be a major struggle. Tony experienced an extraordinary event at this time when a lightning bolt stuck the ground station while he was carrying out tracking and ranging trials on a payload package being driven around the airfield mounted on a car by Peter Turp to simulate a mission flight; needless to say the lightening strike did cause some damage to the ground station and a delay to the trials programme. At a progress meeting (with MOD and Westland’s) when the lightening strike was reported it elicited a very dry – but witty – comment from one of the MOD project team; “That is the most original excuse for a slip in project progress I’ve heard to date!”
The Flight Controls team from Rochester (Tony Bargery) developed the navigation/moving map system and introduced “flying the footprint” concept where a pre-determined route could be programmed into the system so required intelligence data of target location/disposition could be gathered and added to previous intelligence reports. However the limited computing power of the BATES modules resulted in agreement more powerful/faster processing chips other than the BATES chip set could be used to process data in a timely manner which was then passed to the BATES system.
War gaming studies and sensor studies were still ongoing within the MOD research establishments with Fort Halstead focussing on the operational effectiveness on capability from the data being gathered by the sensor trials. Malvern and Farnborough were addressing the performance of the data links and sensors in terms of target and intelligence gathering and how well an operator could interpret moving images. Stan Fray from the Malvern team and Mike Waygood from Farnborough presented a paper which extolled the virtues of thermal imaging over day light sensor in respect of target detection in cluttered scene but the lack of high resolution/sensitivity of the pyro-electic cameras resulted in lower quality intelligence information than provided by the daylight silicon vidicon. The team also explored the “keystone effect” of image distortion when the vertical mounted sensor was steered away from the vertical and hence the “keystone” effect where the lower edge of the image was a shorter distance than the upper edge and its impact on fall of shot correction/accuracy. In 1979 Hugh Marley joined the DSCP team with specific responsibilities for the communications, sensors aspects of the programme which included the development of the “Lettington scanner,” a novel compact IR scanner based on the concept of Professor Dr Alan Lettington from RSRE Malvern and being developed by Rank Taylor Hobson (RTH Loughton) as an alternative scanner to the UK Thermal imaging Common Module (TICM) also being developed by the Basildon team and RTH but at their at Leicester facility. The TICM programme was another key MoD (PE) project under the direction of Les Large and Terry Dorothy. Hugh Marley was also was the co-ordinating project officer for the APRE and Cranfield study inputs to the programme, and the development of the pyro-electric camera being developed by Rex Watton and Plessey research centre Towcester.
Eventually all the component sub-systems were integrated with the ground station and WIDEYE was moved to the Salisbury Plain Larkhill firing ranges. Again extensive ground system tests were carried out as well as integration with the range controller’s instrumentation. Tethered and short range flights were achieved to check all range safety issues and sub-systems were functioning correctly with five Wideye vehicles now being constructed. A series of flights were undertaken each extending flight envelope and gathering data, however after several air platform mishaps including starting a WIDEYE with its safety harness still in place; the programme was put on hold by the Procurement Executive (PE).
It was never determined if the crashes were due to loss of the radio link or mechanical issues within the platform, however after deliberations, the MOD (PE) team terminated the Supervisor programme. It understood the conclusion reached by RAE/Mod (PE) was the WIDEYE power plant produced far too high levels of vibration causing connecting linkages to become loosened resulting in mechanical failure of the platform.
Several other alternatives concepts were considered by MOD (PE) including the CL 227 “Flying peanut” from Canadair and Israeli Aircraft Industries unmanned drone but eventually it was decided to go for open tender to find a new system to meet GSR 3494 needs. This eventually resulted in a competition between Marconi and Ferranti with the Marconi concept being chosen.
1980 The PHOENIX Programme emerges from the ashes.
Although never officially confirmed, it was assumed by industry the programme title of Phoenix was initiated by Hugh Marley, as the programme emerging from the ashes of earlier attempts to meet GSR 3494. The (PE) team in Fleetbank House initiated an industry wide competition for new solutions/concepts to match the GST 3494 needs which certainly stimulated industry. I do not have an insight into how many companies responded and what solutions they offered, however I believe, after analysing contending bids, British Aerospace, Ferranti and GEC- Marconi were short listed to offer detailed proposals for consideration. What follows is the sequence of events taking place within the GEC-Marconi team and I’m sure the other contenders had viable solutions but were not eventually selected for full development.
The Marconi Tiger team is born.
The senior management of GEC-Marconi (Bill Alexander/Ron Howard/Peter Hearne/Wally Patterson/John Shepherd) appointed a Tiger team to take a fresh look at the GSR and put aside all past solutions. The team included myself for sensor/radio link solutions, Stan Armstrong for flight control and navigation solutions and retired Commander Doug Taylor RN for “out of box thinking.” Doug already had a track record for novel “solutioneering” as seen with his proposal to the RN for the “Ski Jump Launch Ramp“ for launching aircraft from aircraft carriers which is now universally accepted and a big step in improved launch safety.
The team analysed the3494 needs again to establish the fundamental issues regarding the conflicting system requirements. From these deliberation came Doug’s first solution, namely a powered regallo wing (a hang glider like wing arrangement) under which was suspended a payload pod containing all the major surveillance and radio link sub systems for the mission. This solution emulated a manned hang glider arrangement but recovery would involve parachuting the pod from the wing to ensure recovery of the costly and technically sensitive sub systems whilst the wing/engine components could either deploy a separate parachute or just be discarded as expendables. This concept also offered mission growth for alternative payload pods which could offer radio relay capability, electronic jamming/spoofing, chaff dispensing, or radar surveillance if the User community had such needs. The pod would house the sensor turret in the lower central region of the pod and at each end steerable antennas would be housed so as Phoenix manoeuvred the antennae would be steered to point towards the ground control station .Once an antenna reached its limit of movement, the antenna at the opposite end of the pod would take over thereby providing continuous 360° communication between Phoenix and the ground control station.
Following presentations to senior management it became evident the regallo wing solution had a major failure issue in meeting GSR 3494 needs, the maximum forward airspeed of the solution was calculated to be 60 knots but the 3494 requirement called for the ability to operate in 100knot headwind conditions. Under such conditions the platform would be “flying” backwards at 40 knots, clearly not what was wanted, so another approach was needed. GEC-Marconi had been working closely with Flight Refuelling Limited (FRL) based at Wimbourne on aircraft conversion packs where a Meteor aircraft could be flown completely unmanned and used as a target drone on the Aberporth firing ranges. Agreement was reached for FRL to join the tiger team and Peter Turner (Chief Performance Engineer) of FRL joined the team as the airframe designer specialist.
1981 Emergence of the Phoenix air platform configuration

The regallo wing concept was re-cycled but this time the wing was replaced by an airframe/engine configuration which had forward air speed more than adequate to provide operational coverage in the weather conditions specified in GSR3494. Deliberations as to whether the aircraft should be a tractor (propeller at the front) or pusher configuration took place with the tractor option being adopted to permit the unusual proposed recovery sequence to be achieved. As stated earlier the “sensor pod” with its potentially costly sensor/radio systems ideally needed to be recovered for re-use, but now as the platform included a more costly airframe configuration it was deemed all parts of the system should be recovered if possible. The logical solution for recovery would have been to house the parachute in the “cockpit “area of the airframe, cut the engine - deploy to parachute and allow gravity to do the rest, but that would mean the sensor pod would become the first point of contact when hitting the ground with the most vulnerable part (the sensor turret) being exposed to certain damage as it would take the brunt of the impact.

By adopting a tractor configuration and twin tail booms this allows for the parachute to deploy from the rear of the airframe underbelly after the engine power is cut the forward motion of the aircraft would fully deploy the parachute. Once the aircraft was falling vertically with propeller nose first it would be possible to release a second set of parachute lines thereby allowing the vehicle to turn over onto its back during recovery. By adding shock absorber material in the cockpit area and using expendable tail booms, it would be possible to achieve a 3 point contact landing with the ground with minimal damage to the most costly sub-systems being avoided.
One further refinement had to be considered, if the payload pod was rigidly attached to the underside of the airframe (as would be the normal configuration), then when the aircraft banked and/or rolled both the sensor and antennae systems would require complex co-ordinate transformation to align the calculated position of the Phoenix (by the ground station knowing range/bearing from its fixed location on the ground to the Phoenix RPV) to where the sensor was pointing (for accurate grid co-ordinates of potential target location or fire correction). Also there was the issue of cross polarisation of the radio link radiation in high bank angle situations. To overcome all these issues it was decided to roll stabilise the pod during aircraft manoeuvres, effectively the pod remains horizontal and parallel to the ground so all the complexities and source of error to the key requirement drivers would be minimised.

So the Phoenix emerges from the ashes as a twin boom tractor airframe with a roll stabilised pod slung underneath and a full recovery capability with a few frangible easy replaceable parts, and with mission creep capability. This concept was presented by the tiger team to the management of FRL and GEC-Marconi and was approved for further company investment to complete the competitive bid package to the MOD (PE). A further detail to be finalised was that of launch methodology with a catapult launch being favoured and adopted.

However during early flight trials an unusual launch method was adopted; namely a “May Pole” type launch; the airframe was mounted on a trolley and a wing tip attached by a retaining wire to a vertical pole. Once the airframe was powered up it “flew” in circles around the pole and the ability of the antennae to maintain the radio links and the sensors to de-rotate and provide a “fixed” picture was checked and proven. The next step was to release the wing tip connection and allow Phoenix to take off and provide images from over the Larkhill ranges. The first launch was nail biting but became a regular achievement.
1982 The introduction of Thermal Imaging Common Module 2 (TICM 2) mini scanner and Zulu telescope to Phoenix
Another team within the Electro-Optical Systems Division (EOSD) at Basildon led by Charles Richardson, Bob Akhurst and Glen Cuthbertson had the responsibility of developing the UK’s TICM 2 which was secured under competitive competition by MOD (PE) Terry Dorothy/Les Large. The electronic modules were developed by Basildon and the scanner module by Rank Taylor Hobson based in Leicester and led by David Domaine. The TICM programme was a very successful MOD (PE) activity with the aim of producing affordable thermal imaging for all of the UK Services by adopting a common set of modular elements which could be configured into land/sea/air platforms. A key element to ensuring the UK were world leaders in this technology was the Tom Elliot detector (TED), Dr Tom Elliot was an eminent material physicist at RSRE Malvern who pioneered the development of a unique detector and its fabrication which resulted in outstanding thermal sensitivity and resolution.
As mentioned earlier a pyro-electic sensor had been used earlier in trials but with the development of TICM 2 provided an option which although more costly than silicon videcon cameras offered moderate resolution 24 hour sensor capability. Although TICM 2 performance and capability was determined in a tri-service operational requirement, the UK Army were the first and major customer (for tank fire control systems) and they mandated the module must be capable being repaired in the field by REME in the TIRF facility; this meant all the hybrid circuit components had to be plug in and no conformal protection coating was to be applied to the cards. By today’s standards these requirements may sound odd but to enable field repairs they were a natural progression from past experience of field repairs to electronic equipment where thermionic valves were the norm. In addition because the scanner module was mounted in a tracked vehicle and in many cases alongside the barrel of the tank’s gun; the vibration and shock specification were far different to those seen for airborne applications.
I examined the detailed drawings of the TICM 2 scanner and determined it was possible to remove the complete outer casing of the scanner and replace with thin side plates; this resulted in the “mini scanner” which was half the size and mass of the original scanner. These drawing were presented to David Domaine of RTH, who was upset initially at the “vandalisation” we had carried out but fully accepted my rationale for doing so and the potential business this “variant” of TICM 2 could generate.
As an adjunct to this but not related directly to Phoenix, I was also addressing use of TICM2 for a programme known as Night Bird (AST1010) which required the electronic modules to survive in high performance aircraft environments. The Flight Controls Division of GEC-Marconi were well versed in such requirements, so I sought their agreement to use their printed card layout experience; so the Army TICM2 modules were re-configured onto cards with integral heat planes, all hybrid components were soldered onto the card and given a conformal coating . An extra feature was to add a “top-edge connector” which allowed access to test points for fault diagnosis; this feature was to meet US Marine Corp needs if we were to compete for business in the US. So the “air variant” of TICM2 emerged.
The final component of the thermal sensor package was that of the lens (or telescope as the thermal imaging specialists calls them), Pilkington Perkin – Elmer (PPE) based in North Wales was a key optical supplier to Basildon. David Morris and Mike Roberts of PPE were approached for a two field of view (FOV) telescope which could provide the image interpreter with the ability to look for finer details once a potential target had been located in the wider FOV. Because of the need to work within the overall diameter of 14 inches (the size of the turret we were intending to use), once the length of the mini scanner was determined I was looking for a very short telescope with minimal weight. An issue with duel field of view telescopes was that to achieve change of magnification, a carousel arrangement was needed to rotate additional elements into the ray path. This would create issues with our need to maintain an inertial balance central payload. In discussions with David and Mike it became evident PPE had been looking at the concept of a (thermal) zoom telescope, something which had never been built yet but offered short length, low weight and minimal change in centre of gravity. PPE developed the Zulu telescope and this completed the sensor package for Phoenix.
1984 Trials at Bovington firing ranges
As part of the MoD competitive procurement process, they called for a “fly-off” of the systems proposed by industry to demonstrate capability and credibility. For the GEC-Marconi/Flight Refuelling team the air vehicle was launched from a pneumatic ramp mounted on an army truck and a short flight took place to demonstrate control and recovery. However the “electronic payload pod” was mounted on a helicopter with a TICM2 sensor turret and a two-way Ku band microwave link for control of sensor functions and enabling display of the images on the ground to the MoD observers.
The previous day pre- MoD trials had gone well for the GEC-Marconi/Flight Refuelling team, however on the actual day heavy overnight rain caused major multi-path data link issues due to saturated surfaces acting as excellent reflectors at Ku band. Fortunately once the helicopter was at 100ft and above these issues disappeared with impressive thermal images being seen. One most remarkable (and perhaps most fortunate for the team) event arose during the trial: a column of tanks were observed on the move on the range area and these were tracked by the payload pod but due to patchy low cloud cover the helicopter flew into the clouds; however the thermal outlines of the tanks were still observable albeit just a hot blob and when the helicopter came clear of the cloud cover the full detailed image was restored. As all the images during the trial had been recorded, the observers asked for this sequence to be replayed and it certainly made a big impression on how good thermal imaging is in this role; perhaps this incident combined with the rest of the impressive trials resulted in MoD awarding the Phoenix a full development and production contract to the GEC-Marconi/Flight Refuelling team.
1985 Phoenix production
Production of 200 Phoenix systems commenced and entered into service with the British Army. The programme had indeed seen many twists and turns both early on and since. Phoenix has seen limited use perhaps because the environment and application over the northern European plains was too restricting and of course the envisioned mechanised land battle in northern Europe never happened. So attempting to use Phoenix in hot high altitude arenas such as Afghanistan would have limited success. But what is very clear Phoenix was the pathfinder project for the use on unmanned vehicles for surveillance in hostile environments and many of the key elements of the technology developed are now seen in those systems in-service now as well as commercial exploitation of small hovering drones.